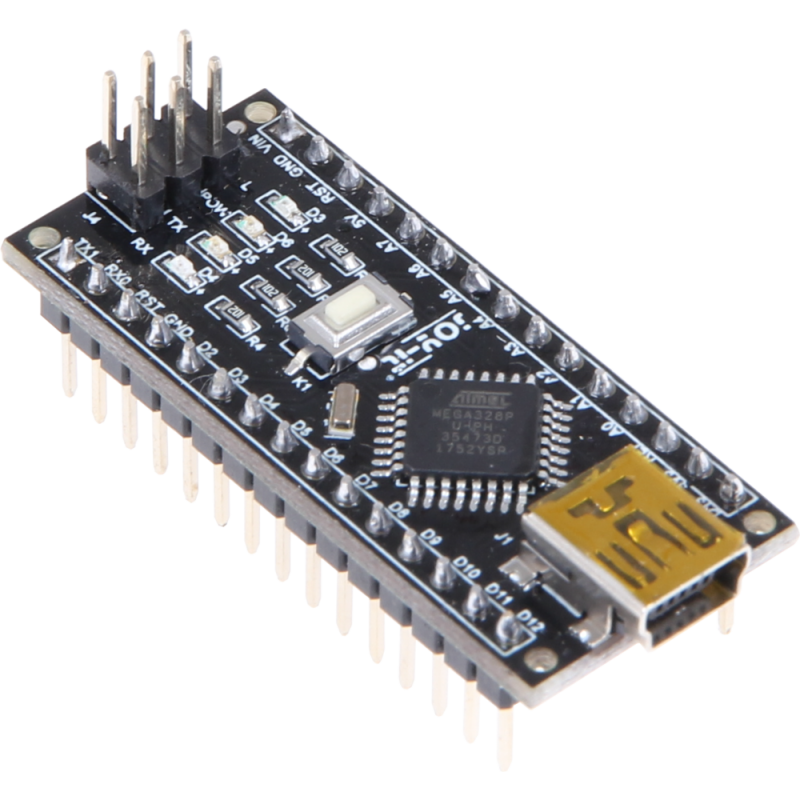



The Joy-IT Nano-V3 is a high-quality product, compatible to the original microcontroller with the original Atmega chip. It stands out due to its very good price / performance ratio and its high quality.
ATmega328P-AU
5V
32 kB (2kB for Bootloader)
2 kB
16 MHz
8
22 (6 with PWM)
1 kB
40 mA
7-12 V
19 mA
18 x 45 mm
8 g
ARD_Nano V3
4250236816111
ARD_NanoV3
